本文主要讲解如何在宇树机器狗上使用 OpenCV 调用摄像头并进行 Apriltag 识别,再通过运动 sdk 实现位姿调整。
目录
二、 调用相机发布话题功能包(camera_move)的创建、配置和代码编写
三、 Apriltag 信息接收功能包(detection_sub)的创建、配置和代码编写
一、前期准备
二、调用相机发布话题功能包(camera_move)的创建、配置和代码编写
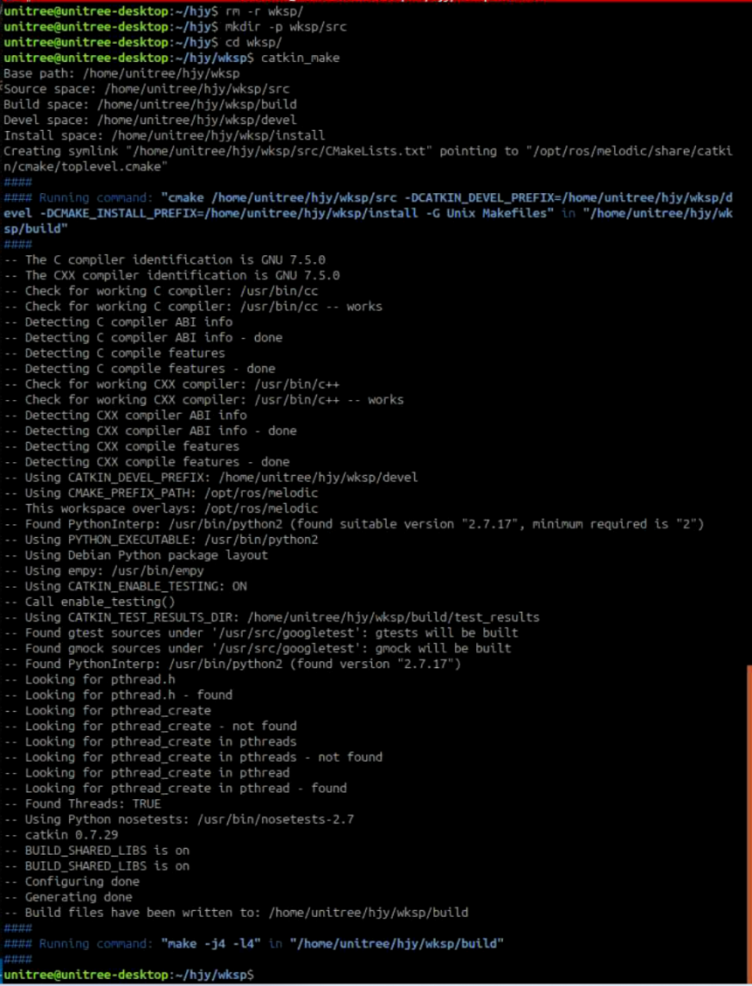
- 创建工作空间(workspace,可以自定义名称,这里用缩写 wksp),并初始化
- 打开命令行,输入:
1 | mkdir -p 自定义空间名称(以 wksp 为例,下文不再提及)/src |
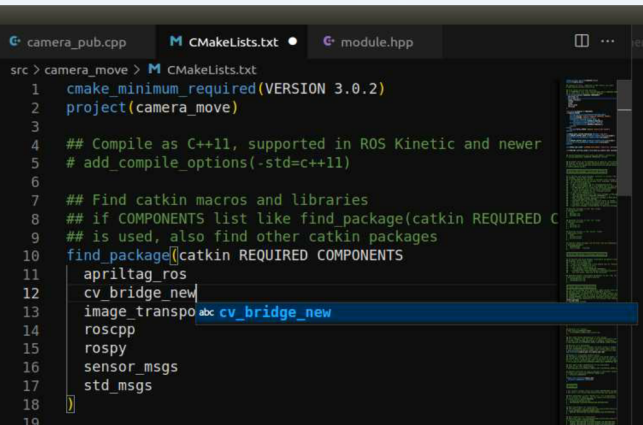
进入 src 创建 ros 功能包并添加依赖
命令行输入:
1 | cd src |
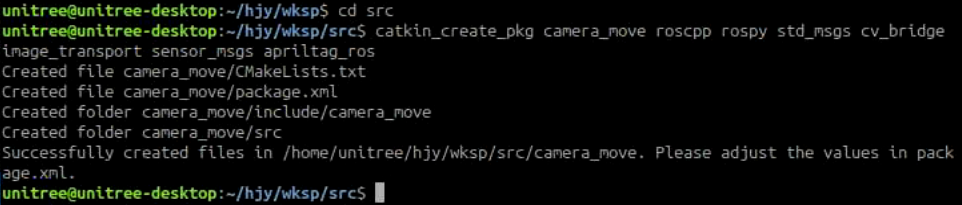
这里的 roscpp、rospy、std_msgs 是不同的库:
roscpp 是使用 C++实现的库
cospy 是使用 python 实现的库
std_msgs 是标准信息库
cv_bridge 用于提供 ros 和 opencv 之间的接口,我们用 opencv 获取图像
image_transport 用来发布和接收图像
sensor_msgs 是一种消息类型
apriltag_ros 是识别 aptiltag 码的 ros 包
- 进入 src 目录编辑源文件(C++代码进入 src,python 文件需要另外创建 script 文件夹)
- 命令行输入:
1 | cd .. 退回上级目录 wksp |

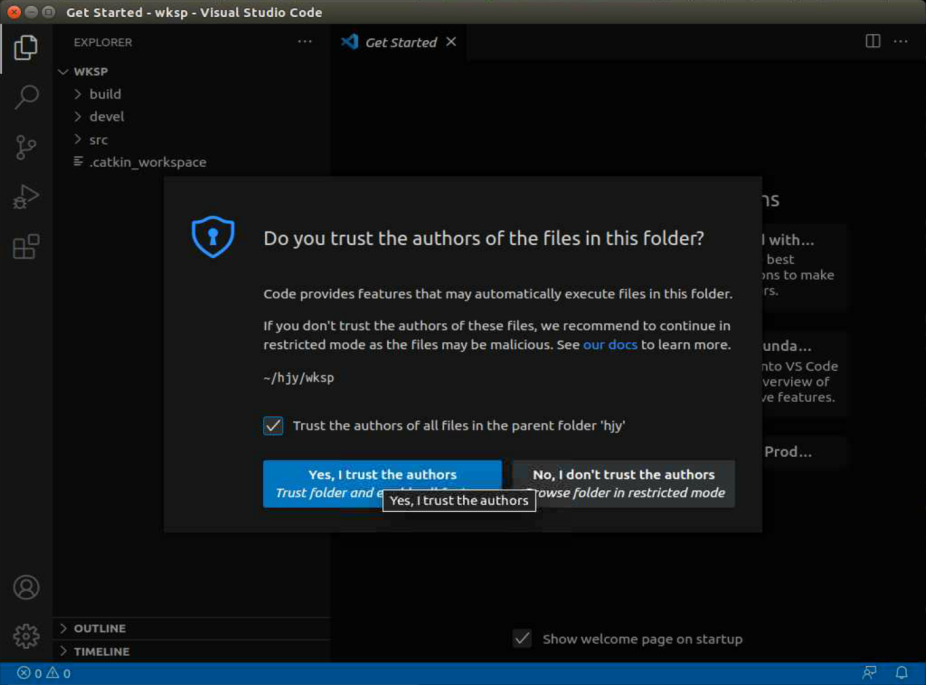
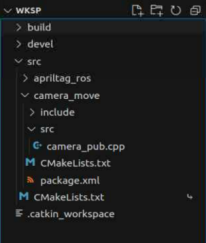
- 点击信任文件夹
- 在左侧文件管理器 src/camera_move/src 目录处右键,创建 cpp 文件(文件名为 camera_pub,用于实现相机图像信息发布
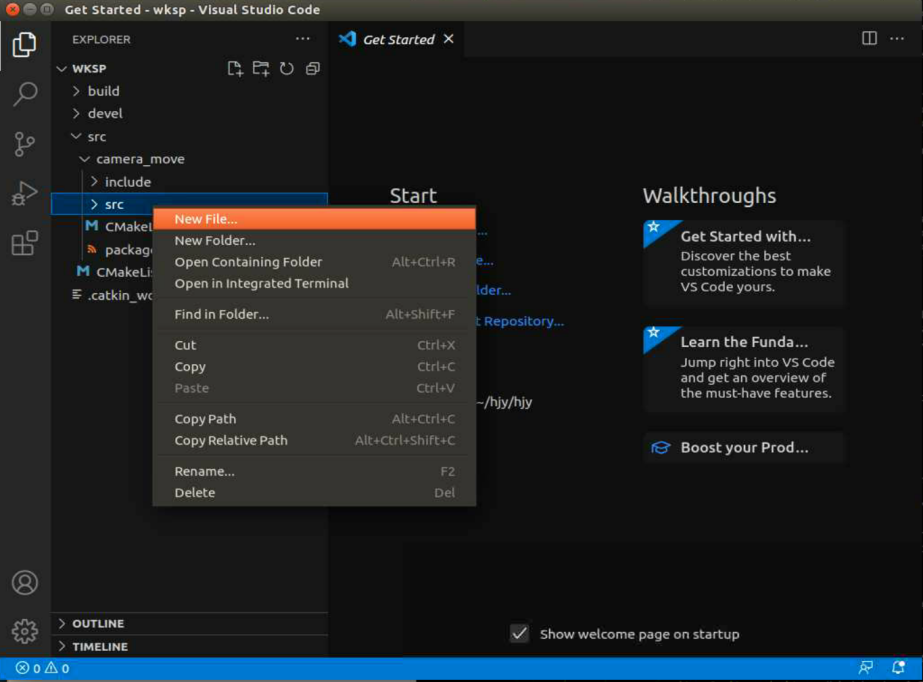
注意 cpp 后缀
编写代码如下,链接打开为代码,解析在注释中:
camera_pub.cc 代码:Ubuntu Pastebin
- 配置 CmakeLists.txt 文件夹:
140 行左右:
add_executable(camera_pub src/camera_pub.cpp)
154 行左右:
target_link_libraries(camera_pub
${catkin_LIBRARIES}
)
- 编译运行:
1 | catkin_make |
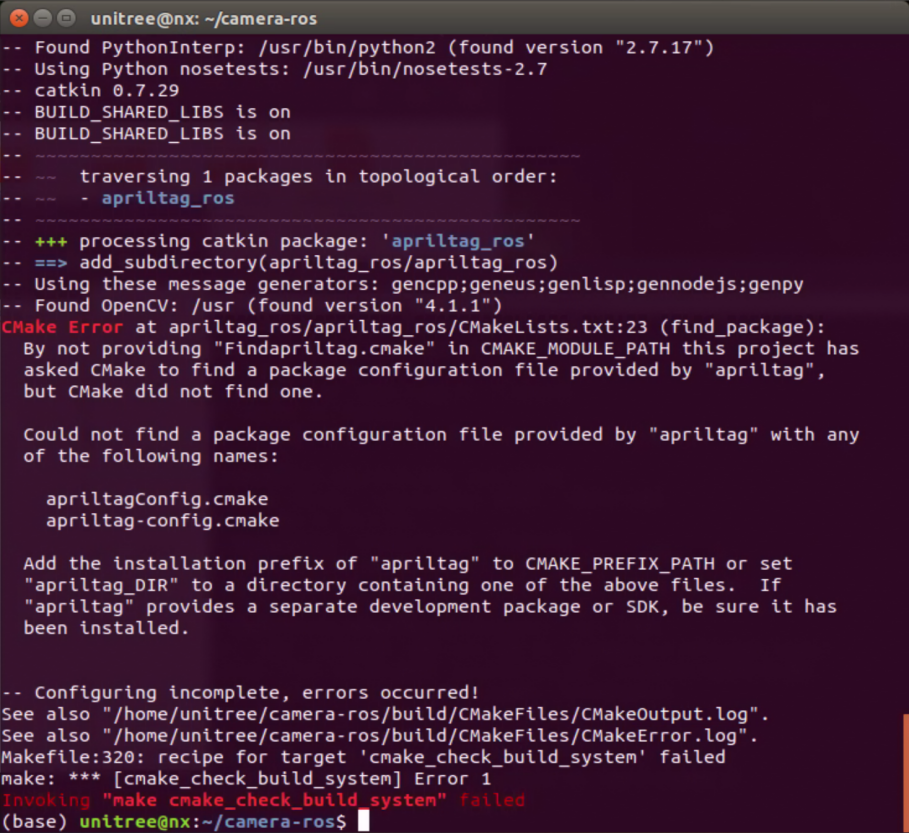
问题 1:若出现报错,提示 apriltag_ros 功能包没有安装,如图: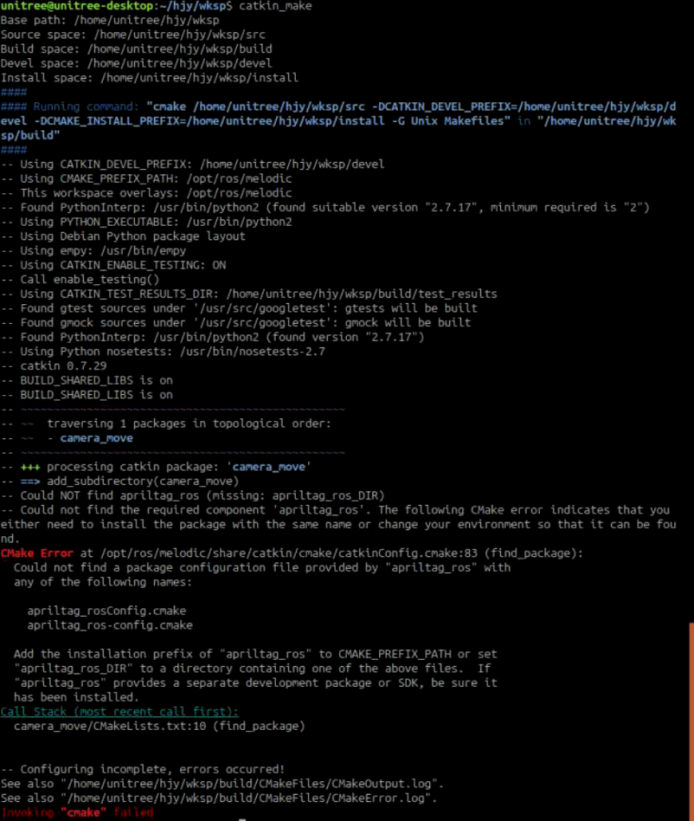
- 则安装 apriltag_ros 包,将源码拷贝到 ros 工作空间中的 src 目录下:
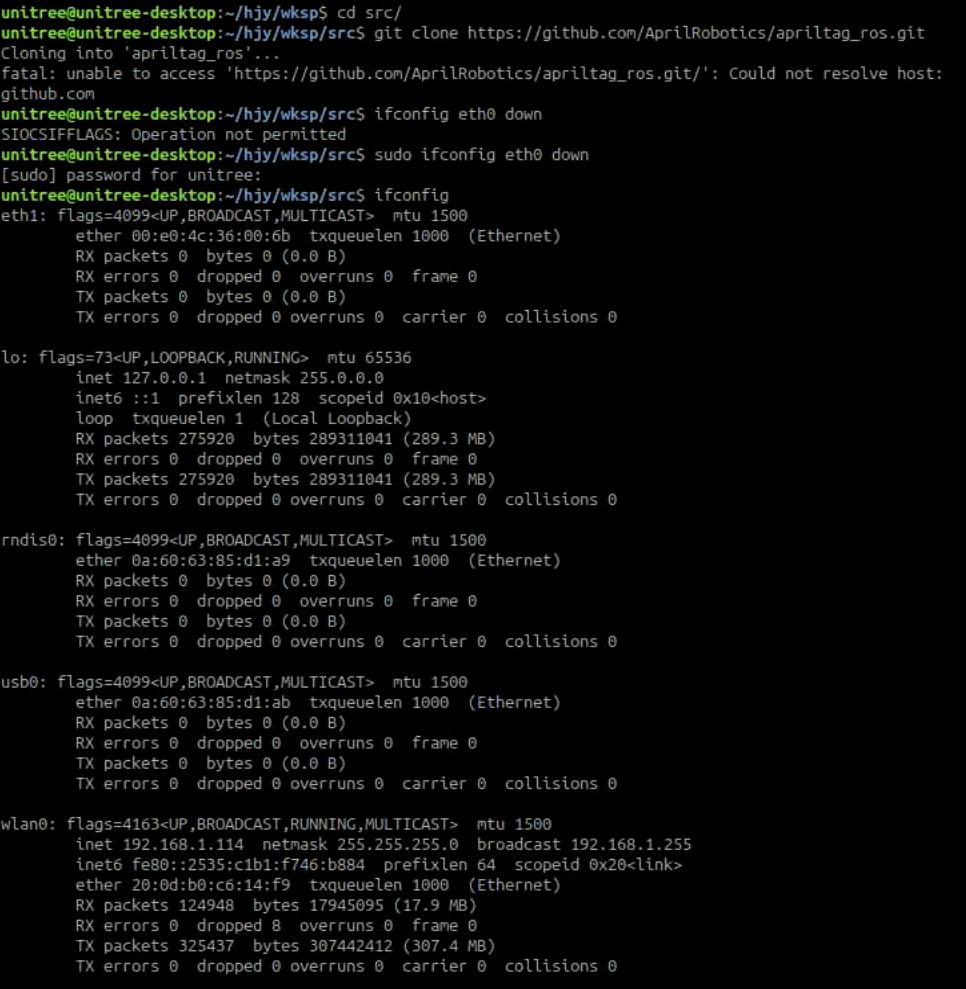
1 | git clone https://github.com/AprilRobotics/apriltag\_ros.git #在 src 文件夹内 |
若一直 clone 失败,注意检查机器狗对应板卡是否插入网卡,再通过 ifconfig 查看 eth0 是否存在,若存在,使用 sudo ifconfig eth0 down 命令关闭 eth0(密码 123),再重试 git clone 命令,可以尝试先 ping github.com,ping 通后,再进行 git clone
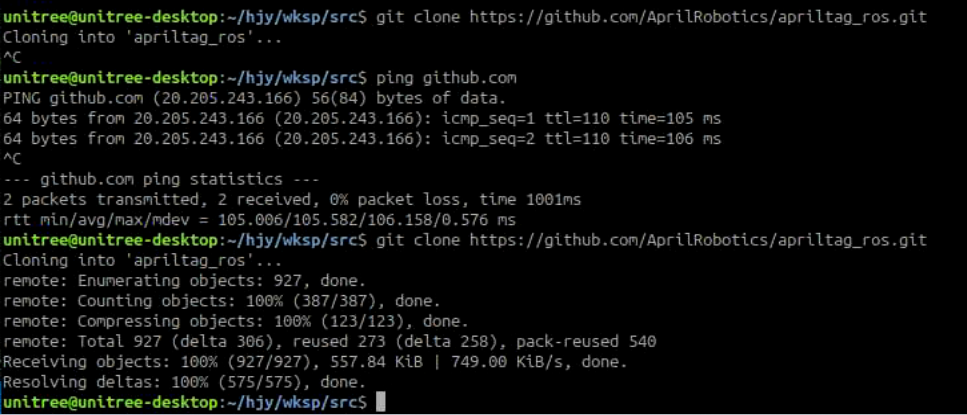
如果一直访问 github 网址失败,也可以直接下载压缩包,U 盘传入再解压;
成功后,工作空间下的 src 目录会多出一个 apriltag_ros 功能包;
这时重新编译:
1 | catkin_make |
问题 2:若出现类似的缺少功能包问题,下载需要的功能包即可
1 | sudo apt-get install ros-melodic-apriltag |
- 使用 apt-get 需要机器狗联网,否则需要上 github 搜索对应功能包,用压缩包的方式安装,若出现类似套娃式的依赖包缺失,可以先
1 | sudo apt-get install aptitude |
- 然后用 aptitude 代替 apt-get 下载,这个工具会帮助下载所有需要的依赖包
问题 3:若出现类似的 opencv 路径问题,是因为 NVIDIA 的 32.3.1image 自带的是 opencv4 版本,把 opencv 命名成了 opencv4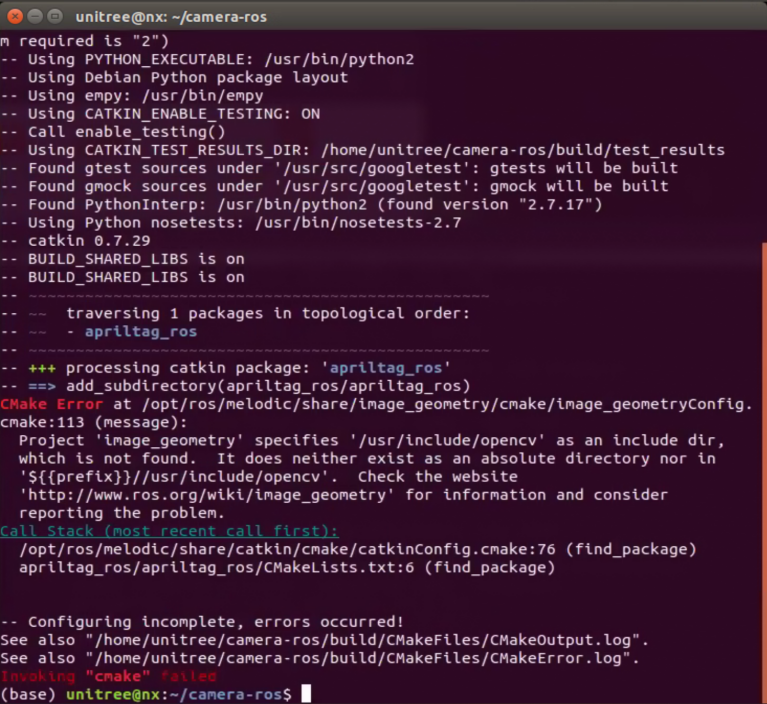
找到对应的文件,修改 opencv 为 opencv4,这是让功能包适应系统环境
也可以如博客内评论所说,将 opencv 的命名软连接到 opencv4 上,这是修改系统环境,可以适配大部分功能包
问题 4:会发现之前的 apriltag_ros 功能包成功通过编译,但在宇树相机部分出现错误,这是因为没有配置好宇树相关的 sdk 文件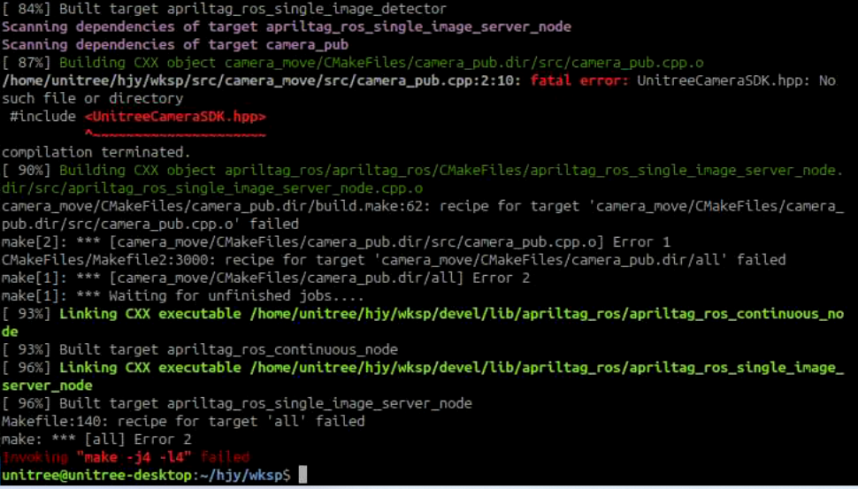
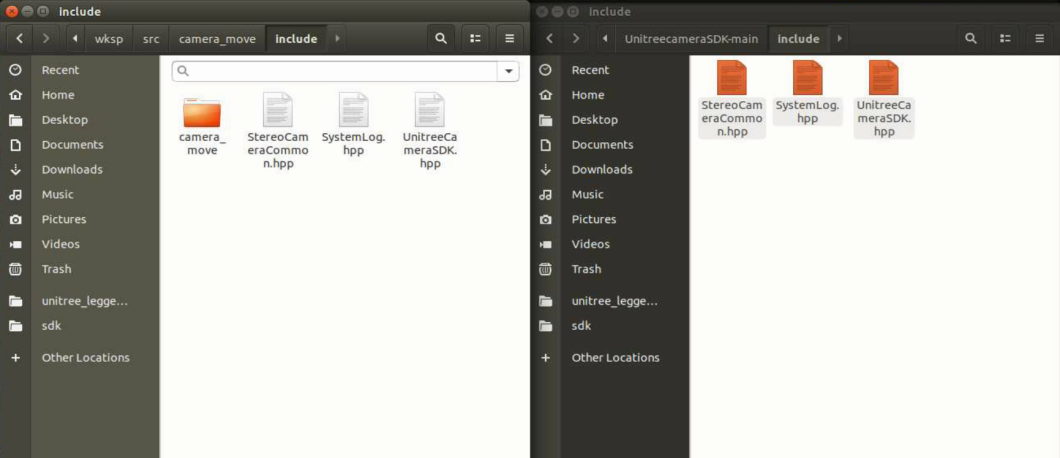
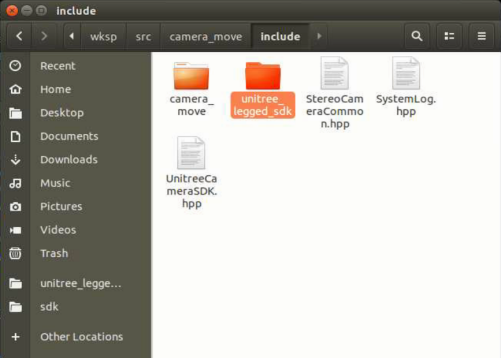
将相机 sdk/include 中的三个文件复制进 camera_move 功能包的 include 中
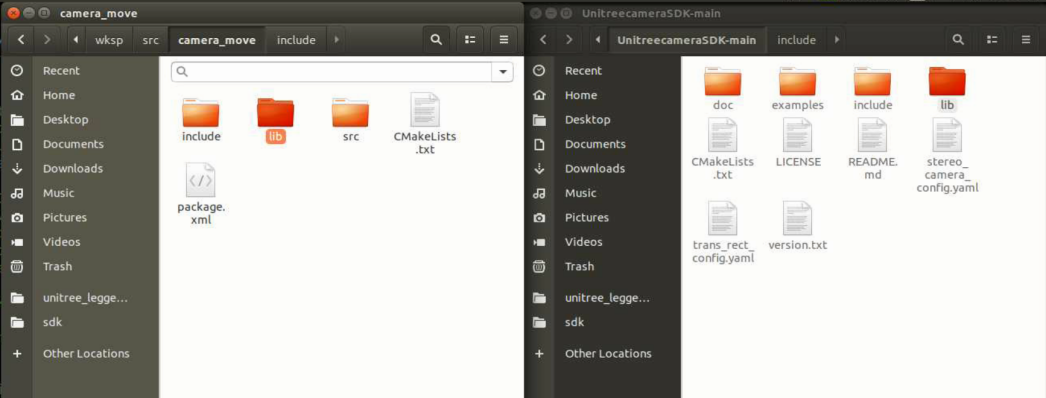
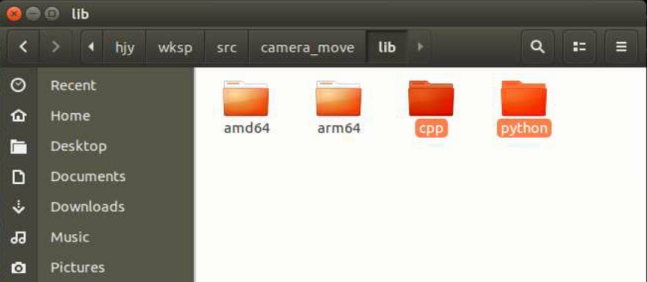
将相机 sdk 的 lib 文件夹复制进 camera_move 功能包中
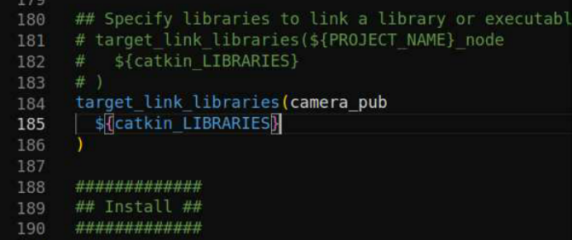
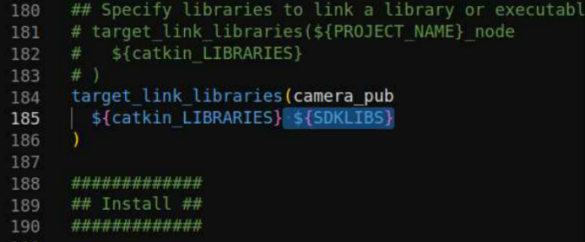
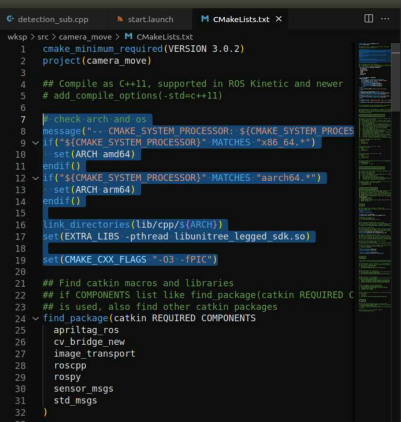
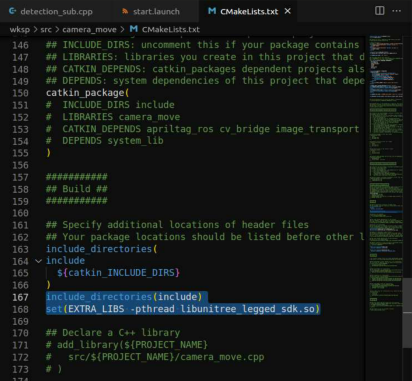
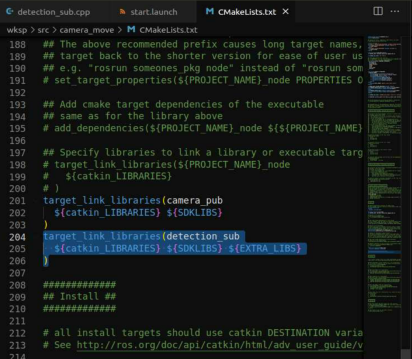
最后根据相机 sdk 中的 CMakeLists.txt 配置功能包中的 CMakeLists.txt:
复制蓝字部分
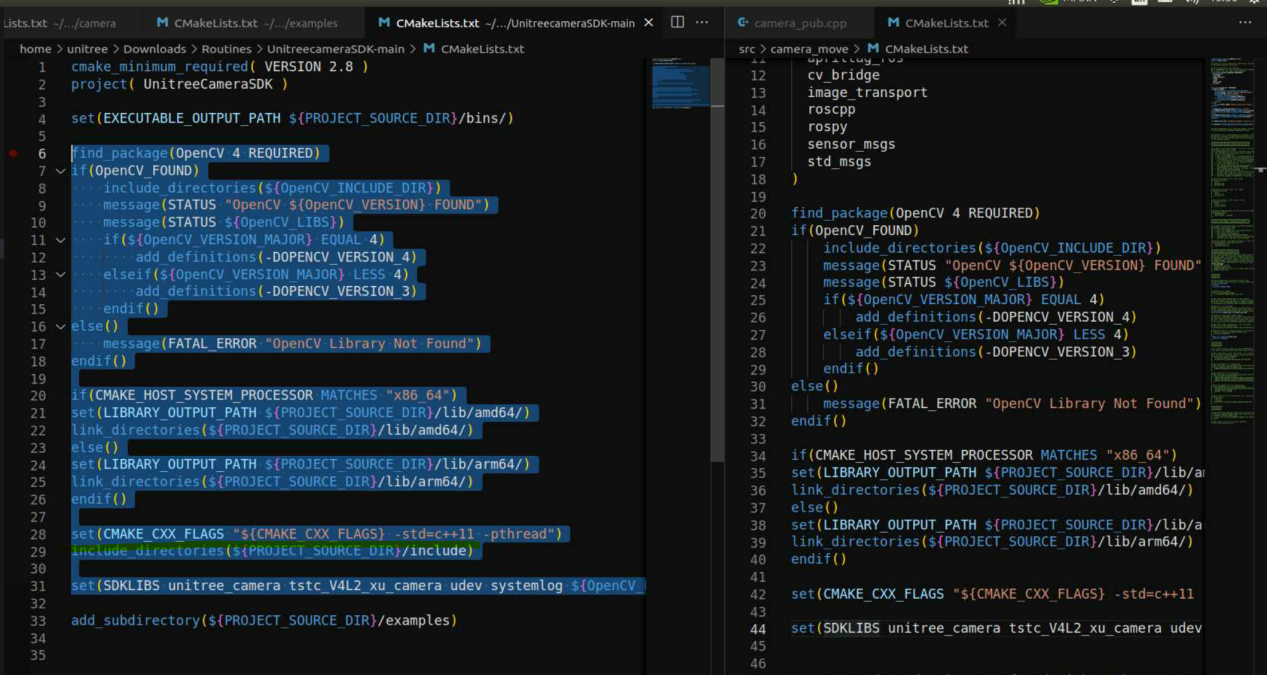
取消 include 的注释
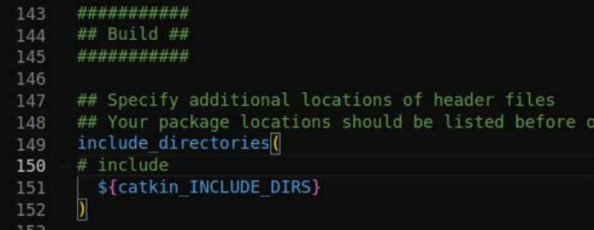
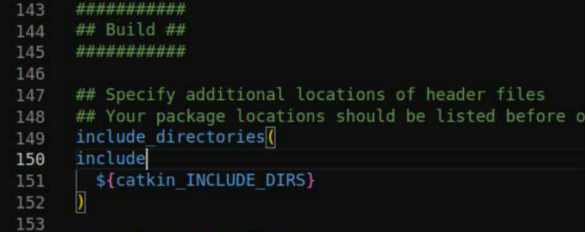
在这后面增加${SDKLIBS}
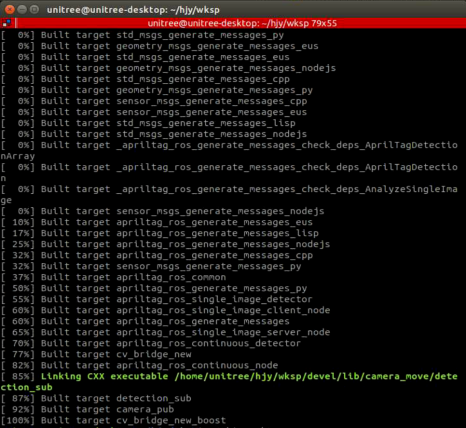
最后成功编译
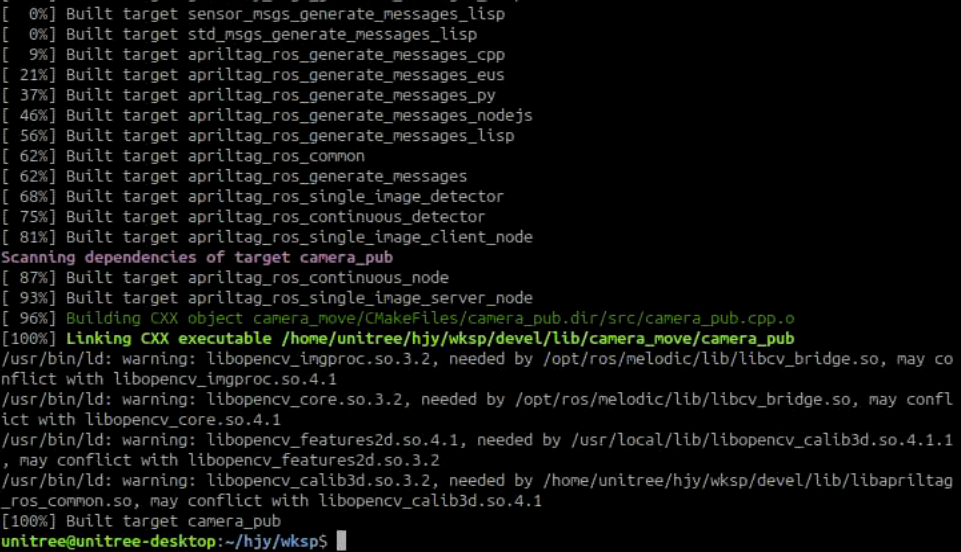
这里提示的 warning 暂且不管,先尝试运行,发现失败:
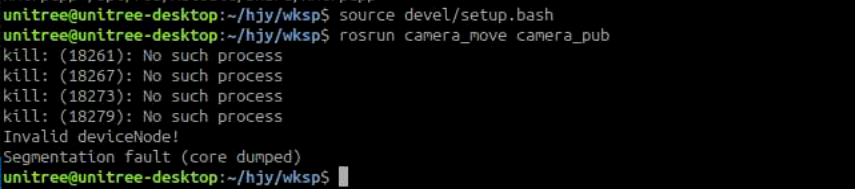
问题 5:这是 cv_bridge 与 opencv4 版本冲突导致的,解决办法是将 cv_bridge 和自己功能包的依赖设为同一版本的 opencv,这里参考的是这篇文章,写得很详细:
解决 cv_bridge 与 opencv4 版本冲突问题_Thoven 的博客-CSDN 博客
先下载 noetic 版本的 cv_bridge(狗上的 ubuntu 是 melodic 版,但不影响,noetic 版本的 cv_bridge 经过一定修改后在 melodic 上也可以使用)
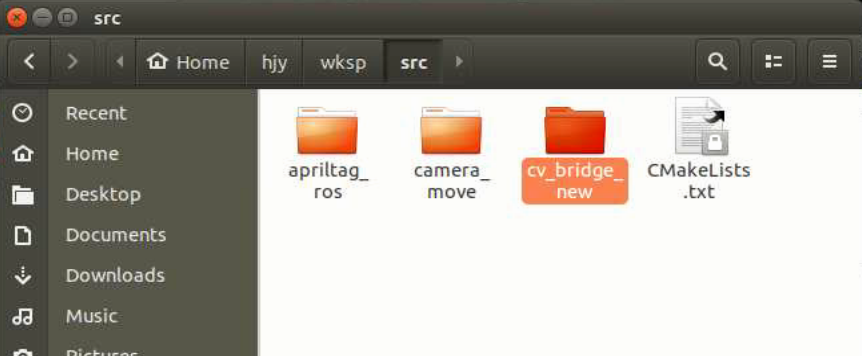
在 https://github.com/ros-perception/vision_opencv/tree/noetic 处下载,解压缩后将里面的 cv_bridge 文件夹拷贝到工作空间的 src 文件夹下,并将这个包重命名为 cv_bridge_new,以防混淆
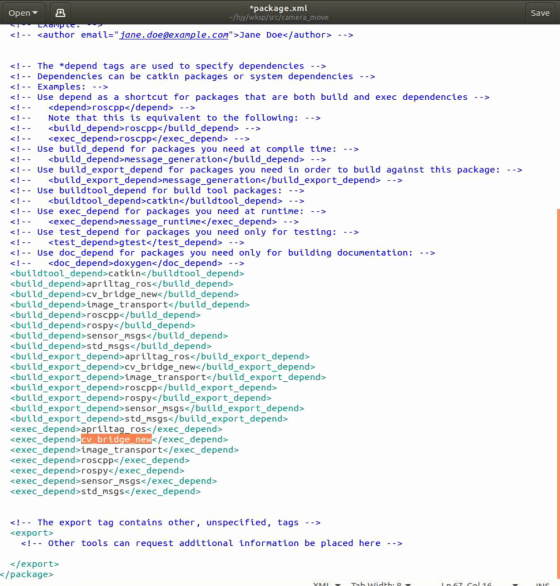
同时修改 cv_bridge_new 功能包中 package.xml 和 CMakeLists.txt 中的包名
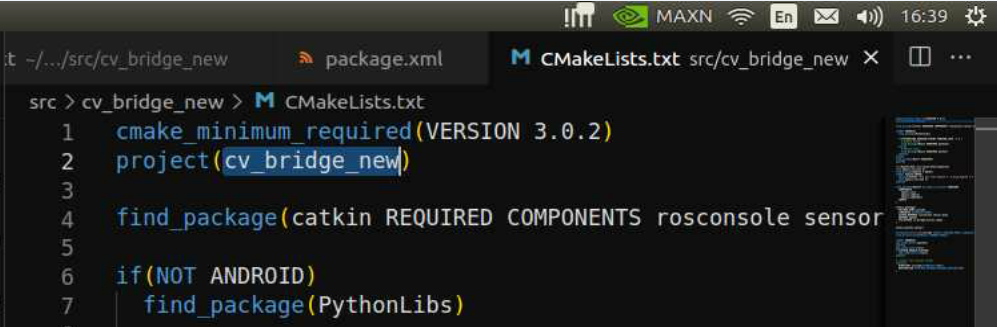
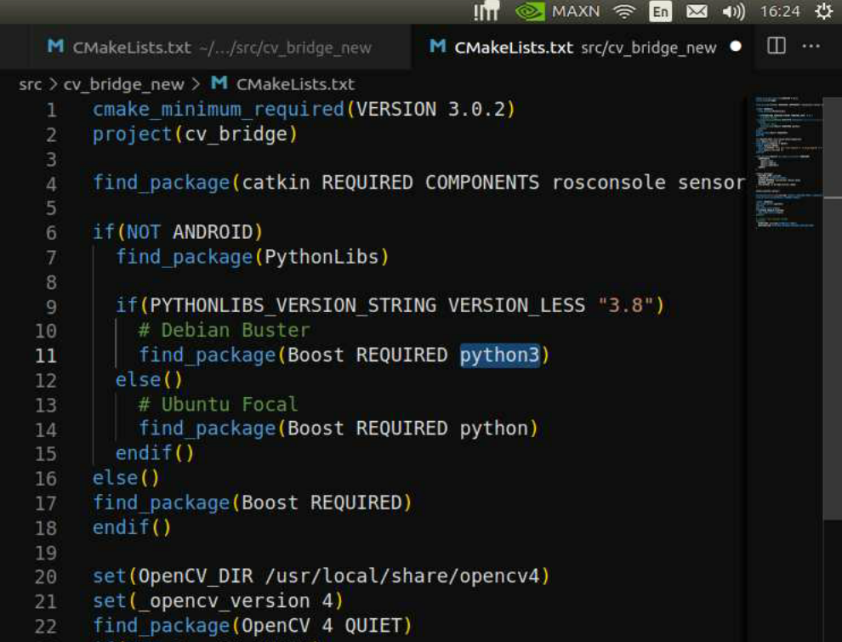
在 cv_bridge_new 中的 CMakeLists.txt 中指定为 camera_move 的 CMakeLists.txt 中指定的 opencv4 路径
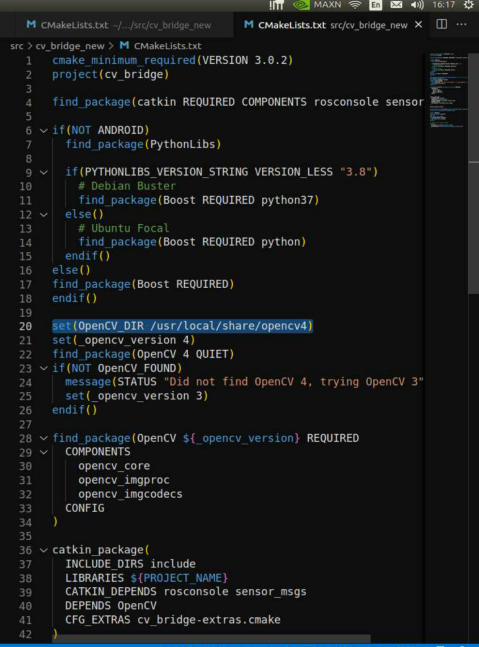
注意,一般都存放在/usr/local/share/opencv4 中,可以通过
1 | sudo find / -iname “\*opencv4\*” |
查找确认,这里 opencv4 的子目录没有 build 文件夹,因此省略后面的路径
然后在工作空间编译,会出现错误:
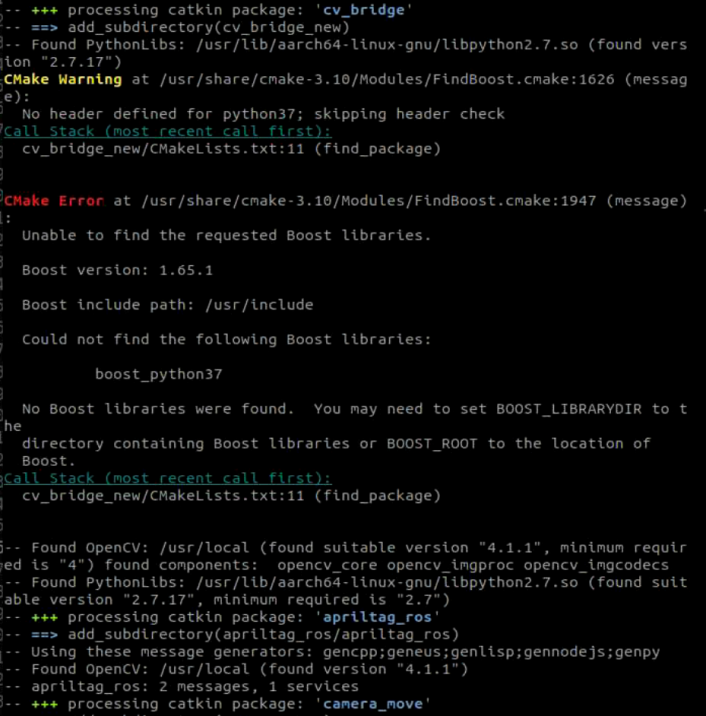
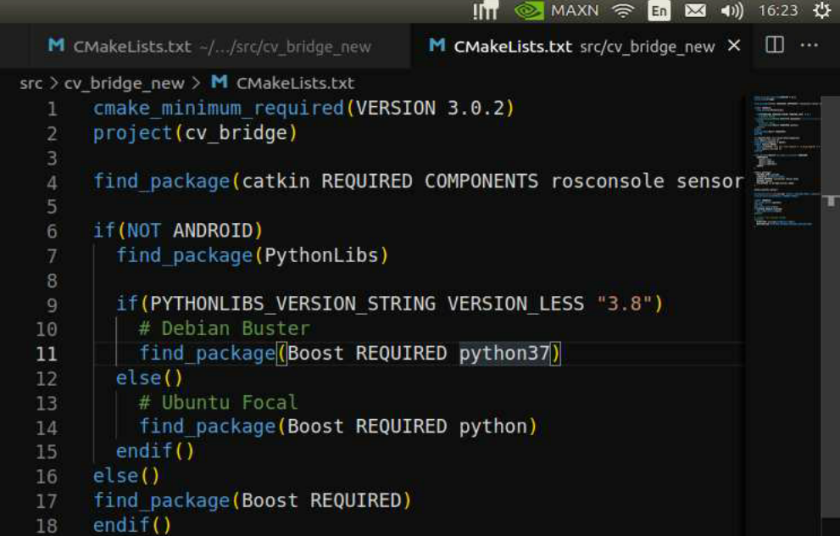
需要在 CMakeLists.txt 文件中修改 python37 为 python3
再编译出现第二个错误: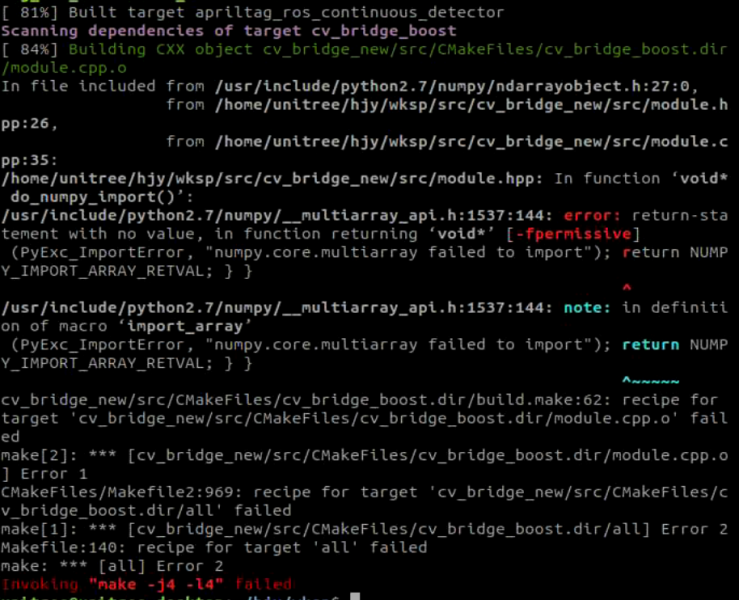
直接修改 cv_bridge_new/src/module.hpp 文件下 void* do_numpy_import()函数如下:
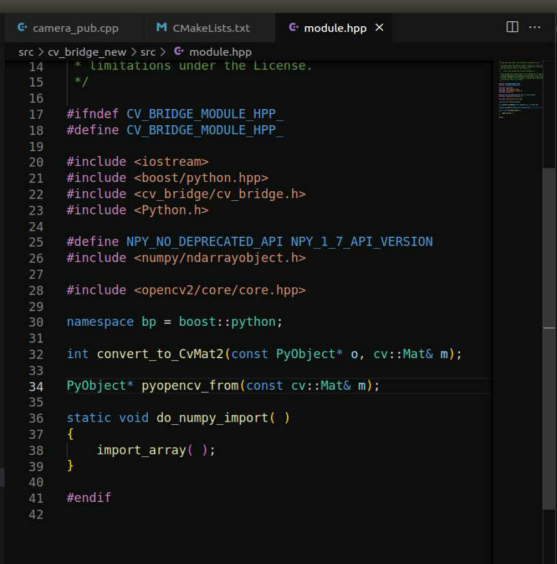
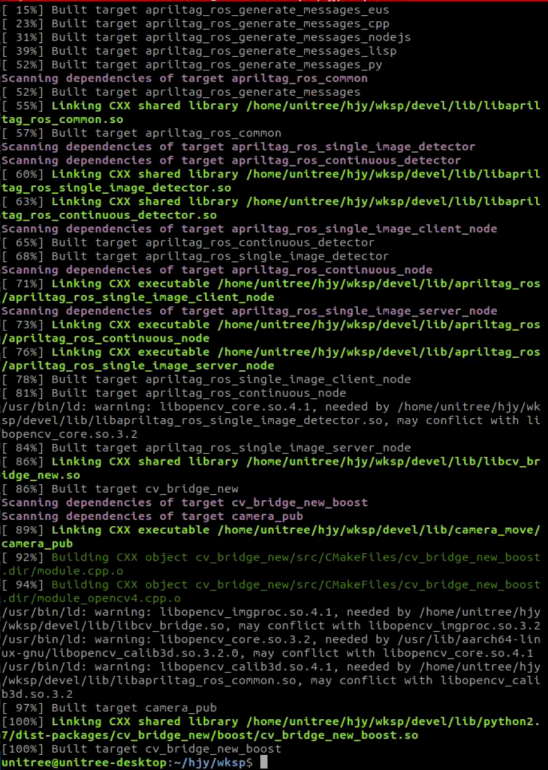
最后编译成功:
最后一步,在 camera_move 功能包中的 CMakeList.txt 和 package.xml(有三个地方需要修改)中修改 cv_bridge 名字:
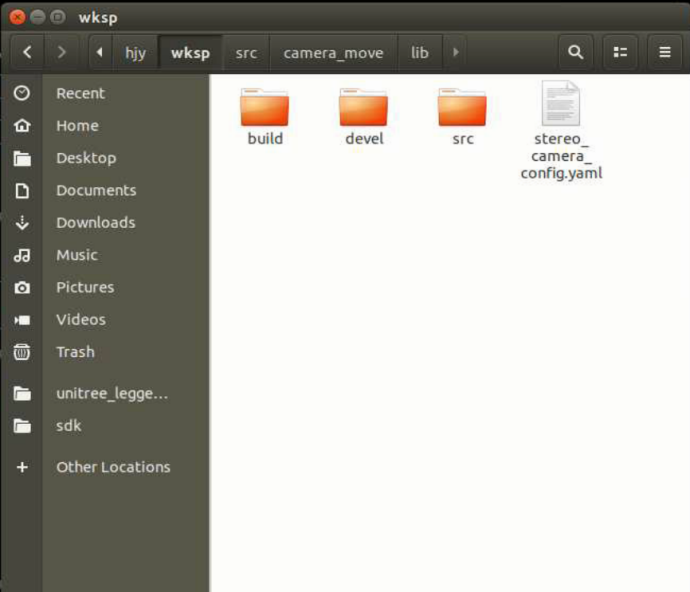
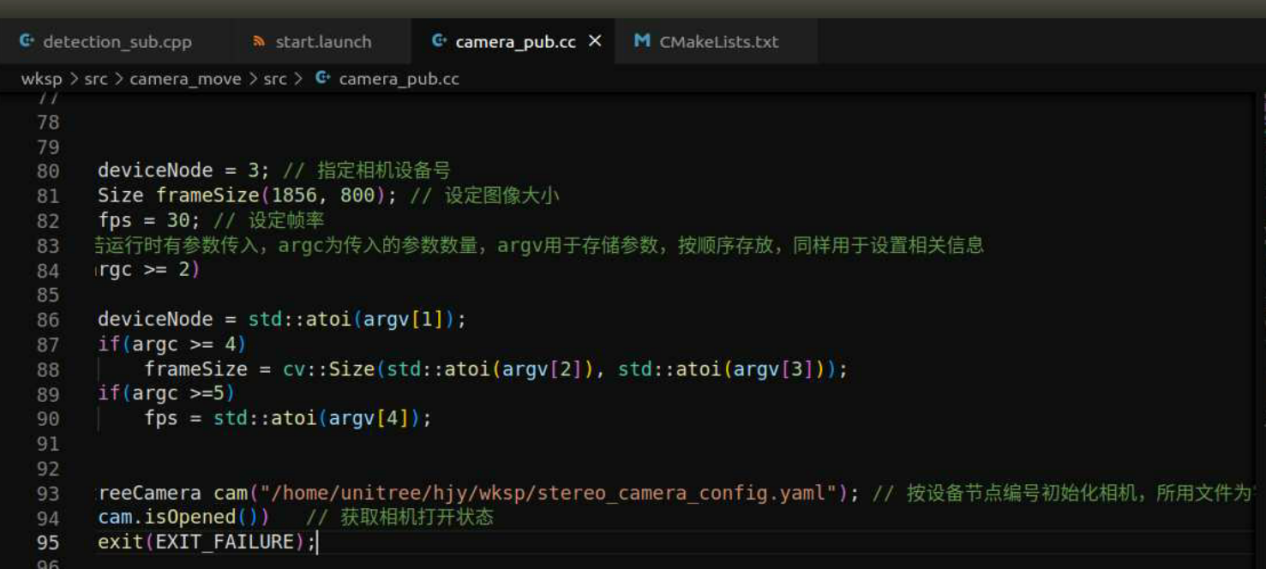
问题 6:如果运行时一直出现 invalid devicenode 错误,反复检查配置文件都没有问题,检查是否添加了 stereo_camera_config.yaml 文件到 wksp 目录下。
因为是在 wksp 路径处进行的 rosrun,因此代码中寻找这个文件时,会以 wksp 路径作为源路径,所以这个 yaml 文件会在 wksp 中找,一旦找不到就会程序崩溃。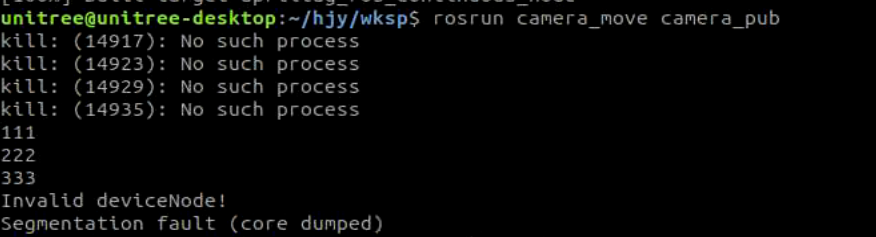
最后成功启动得到的画面:
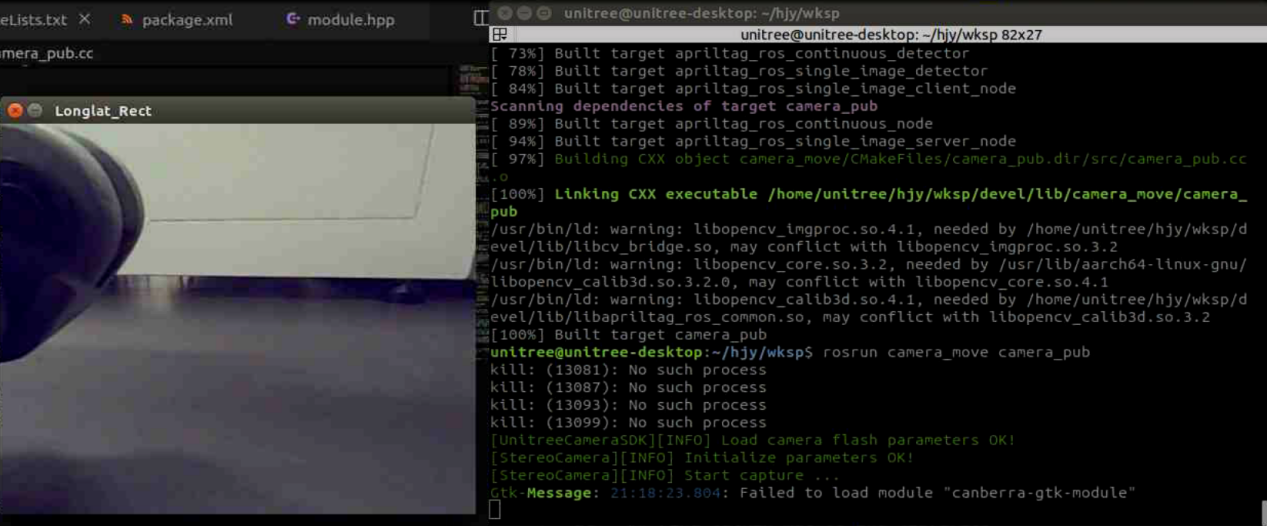
这样相机的图像就能获取到了。
三、Apriltag 信息接收功能包(detection_sub)的创建、配置和代码编写
- 在 src 目录创建第二个 cpp 文件:detection_sub,用于接收 apriltag_ros 识别完 tag 后发出的话题,并且进行运动控制:
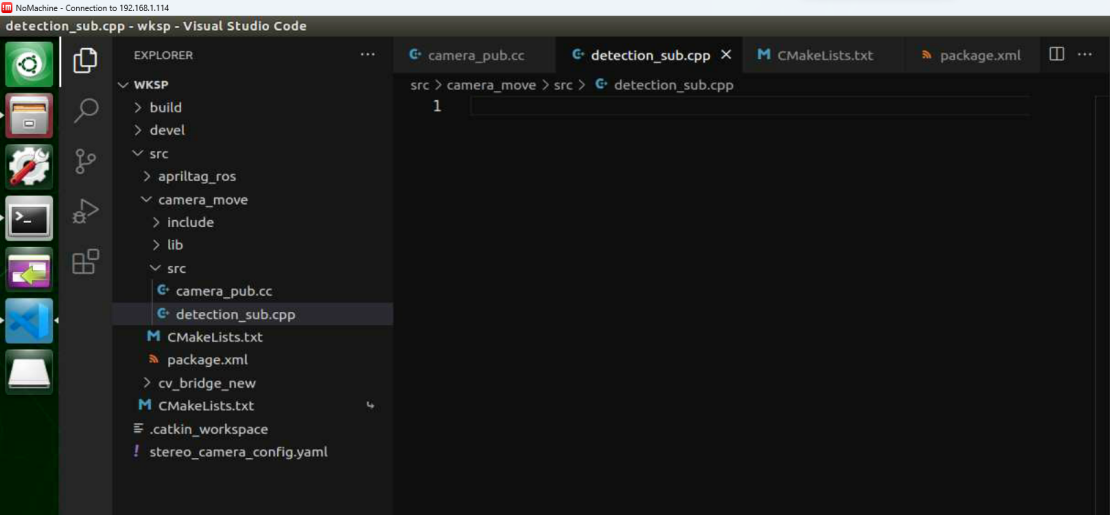
- 代码如下,解析在注释中:
detection_sub 代码:Ubuntu Pastebin
之后需要根据宇树运动 sdk 配置 CMakeList.txt 文件:
然后将需要的 lib 等文件添加,同样在 sdk 中寻找:
最后 catkin_make 编译成功:
用 rosrun camera_move detection_sub 尝试运行,若成功运行会出现:

四、Launch 文件一键启动(start.launch)的创建、配置和代码编写
接下来编写一个 launch 文件用于一次性启动三个程序,camera_pub,apriltag_tag 识别,detection_sub:
- 先在 sksp 路径下创建一个 launch 文件夹,再在文件夹里创建一个 start.launch 文件,编写:
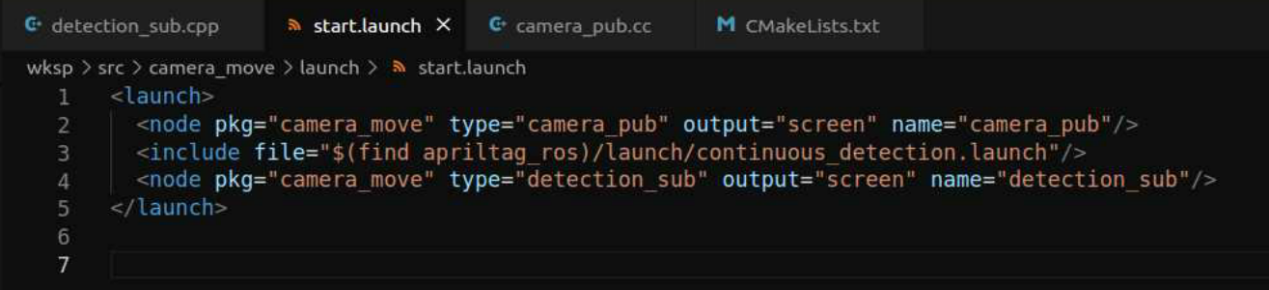
- 意思是按顺序启动三个程序,这里需要注意,用 launch 文件启动时,启动路径与 rosrun 不同,因此之前设置的 yaml 文件路径最好修改成绝对路径:
最后需要配置 apriltag_ros 中关于标签的配置信息,用于识别到规定好的标签:
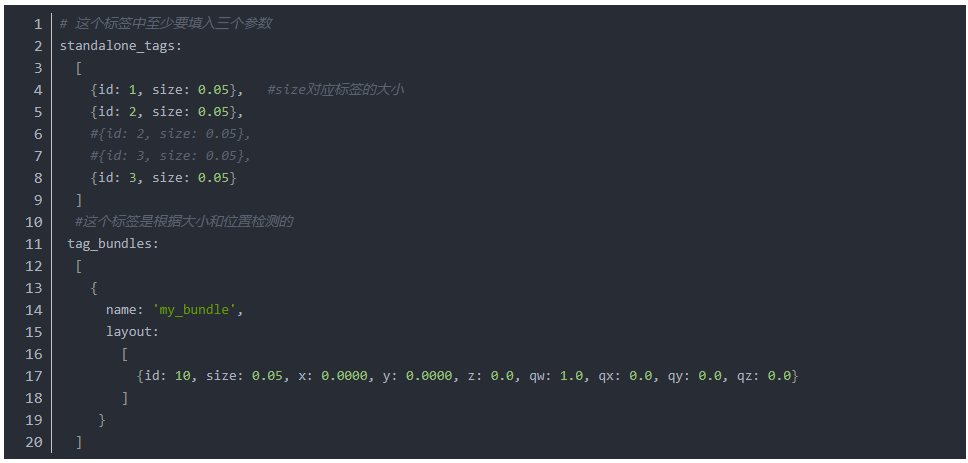
编译后运行 launch 文件:
roslaunch camera_move start.launch就能启动所有程序,实现根据 apriltag 识别结果进行位姿调整。
五、总结
结果:
项目最终能够成功通过 apriltag 让机器狗调整位姿,通过参数控制可以保持规定好的距离、角度,且准确度不错,并且延迟在可接受范围内。
不足:受到机器狗本身相机的分辨率限制,5cm 的 apriltag 码识别范围只在 1m 左右;另外,狗的位姿调节方式,即运动控制还存在一定问题,例如向右平移和向右转向的速度没有达到预期效果,pid 的效果也并不明显。
改进:
- 研究清楚机器狗对向右方向的运动存在什么问题,尝试解决;在项目的基础上仔细调参,使 pid 真正发挥作用,让位姿调节的时间达到最低,最终能够应用在集群控制上。