解决了如何让 Apriltag 功能包成功识别宇树机器狗相机 sdk 获得的图像的问题
问题发现:
在进行实验室实习项目时,需要使用 Apeiltag 功能包,但宇树机器狗只提供了相机 sdk 来让使用者调用相机,传统的 usb_cam 功能包方法需要额外配置参数,这里我选择仍使用 sdk 来打开相机。
实现过程:
首先研究与 Apriltag 功能包有关的话题

- 可以知道 apriltag 功能包需要接收 /camera/image_rect 和 /camera/camera_info 两个话题。
- 而调用相机 sdk 之后,得到的图像就可以作为 image_rect 话题的输入,那么问题就到了 camera_info 这个话题上,有两个方面需要解决:这个话题是什么,这个话题怎么给。
- 首先,这个话题是关于相机的一些参数信息,根据博客:https://blog.csdn.net/wangmj_hdu/article/details/115002514 中的分享,我们可以得知这些参数的含义:
- header:标准消息头
- seq:序列 ID,连续递增的 ID 号
- stamp:两个时间戳
- frame_id:与此数据相关联的帧 ID
- height:图像尺寸,height 代表高度,(height*width)相机的分辨率,以像素为单位
- width:图像尺寸,width 代表宽度,(height*width)相机分辨率,以像素为单位
- distortion_model:指定了相机畸变模型,对于大多数相机,”plumb_bob”简单的径向和切向畸变模型就足够了
- D:畸变参数,取决于畸变模型,(k1, k2, t1, t2, k3),(我的这个 usb 相机号称是无畸变相机,但通过标定结果可以看出来还是存在畸变的,是不是被商家坑了,哈哈哈)
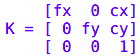
- K:相机内参矩阵,使用焦距(fx, fy)和主点坐标(cx, cy),单位为像素,内参矩阵可以将相机坐标中的 3D 点投影到 2D 像素坐标
- R:旋转矩阵,将相机坐标系统对准理想的立体图像平面,使两张立体图像中的极线平行
- P:投影矩阵
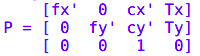
左边 3*3 矩阵是相机的内参矩阵,将相机坐标中的 3D 点投影到 2D 像素坐标,可能与相机内参 K 不同。对于单目相机 Tx = Ty = 0。对于双目相机,Tx 和 Ty 有所不同。 - binning_x:图像下采样参数,水平方向
- binning_y:图像下采样参数,竖直方向
- (width / binning_x) x (height / binning_y)
- 下采样:binning_x = binning_y > 1。缩小图像,生成对应图像的缩略图,使得图像符合显示区域的大小。
- roi:感兴趣区域定义,即完整图像上的一个矩形子窗口
- 接下来就是关于这个话题的输入方式,因为宇树有给出相机的标定参数:
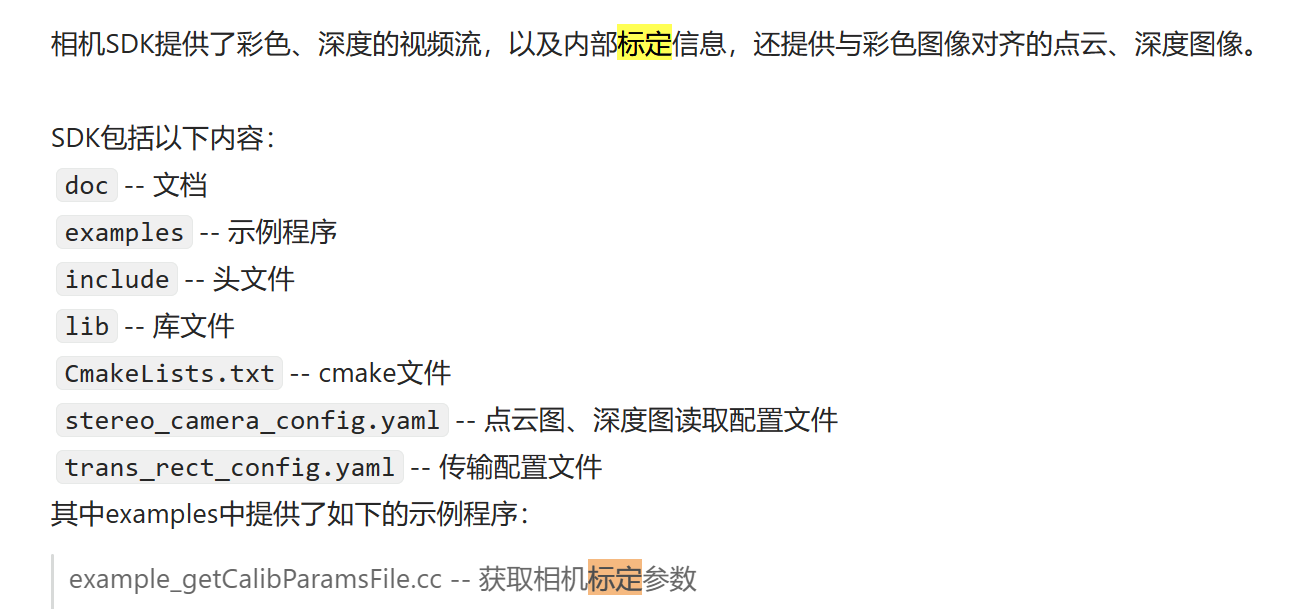 因此直接通过这些参数计算出 camera_info 需要的参数即可:
因此直接通过这些参数计算出 camera_info 需要的参数即可:
1 | // 相机信息处理 |
正常使用 apriltag
现在我们提供了 Apriltag 功能包需要的话题,就能够正常使用 apriltag 了,只需要发布话题出去,然后通过 apriltag 功能包给出的使用方法就能够实现让 Apriltag 功能包成功识别宇树机器狗相机 sdk 获得的图像。
1 | while (cam.isOpened()) |
完整代码见: